Wolken zijn niet alleen fascinerend om naar te kijken maar spelen ook een belangrijke rol in ons klimaatsysteem en in de meteorologie. Visuele waarnemingen van wolken door professionele waarnemers zijn duur en deels subjectief.
Daarom worden deze waarnemingen waar mogelijk automatisch uitgevoerd met remote sensing systemen. Eén van deze remote sensing systemen is de ceilometer, of in goed Nederlands, een wolkenhoogtemeter. De wolkenhoogtemeter is gebaseerd op het LIDAR-principe (zie kader) en neemt waar vanaf de grond. In dit artikel beschrijven we twee toepassingen van de wolkenhoogtemeter: het meten van de hoogte van de wolkenbasis en het bepalen van de hoogte van de atmosferische grenslaag.
Al vanaf de oprichting van het KNMI in 1854 zijn wolkenwaarnemingen door menselijke waarnemers uitgevoerd. Tegenwoordig worden volgens internationale afspraken de hoeveelheid, de hoogte en het wolkentype van maximaal vier wolkenlagen gerapporteerd. De hoeveelheid bewolking, de zogenoemde bedekkingsgraad, wordt uitgedrukt in okta’s (achtsten) van 0 (geheel onbewolkt) t/m 8 (volledig bewolkt), terwijl 9 okta betekent dat de bovenlucht onzichtbaar is bijvoorbeeld vanwege mist. De hoogte van de wolkenbasis wordt gegeven in hoogteklassen, tot 1500 m in stappen van 30 m en daarboven in stappen van 300 m. De waarnemer bepaalt uurlijks de bewolking door op het waarneemtijdstip de gehele hemelkoepel te bekijken en hoeveelheid, hoogte en type van de wolken te schatten.


Sinds de introductie van de wolkenhoogtemeter (figuur 1) op de nationale luchthavens is dit instrument een belangrijk hulpmiddel om de hoogte van de wolkenlagen nauwkeurig te bepalen. Sinds november 2002 zijn ook automatische waarneemstations van het KNMI voorzien van een wolkenhoogtemeter (figuur 2) en worden wolkenwaarnemingen automatisch uitgevoerd. Alleen op de luchthavens van Amsterdam en Rotterdam heeft het KNMI nog professionele waarnemers in dienst voor het verrichten van luchtvaartwaarnemingen.
De wolkenhoogtemeter verricht een nagenoeg verticale puntmeting en rapporteert elke 15 seconden de hoogte van eventueel aanwezige bewolking in de LIDAR-bundel. Deze bundel heeft op 1 km hoogte een effectieve doorsnede van ongeveer 1 m. Om de hoeveelheid en hoogte van de wolkenlagen te bepalen wordt een tijdserie van deze metingen gebruikt. De totale bedekkingsgraad is het percentage LIDAR-metingen van het afgelopen half uur waarin een wolk werd gedetecteerd. De tijdserie van de wolkenbasishoogtemetingen wordt vervolgens gesorteerd op hoogte, waarna voor elk okta-interval de bijbehorende wolkenbasis wordt bepaald. Wolkenlagen die dicht bij elkaar liggen worden daarbij samengevoegd.
Bewolking bepaald door waarnemers is niet hetzelfde als de automatisch bepaalde bewolking. Een waarnemer rapporteert een momentopname van de bewolking waarbij ruimtelijke informatie wordt gebruikt. De automaat gebruikt een tijdserie van de bewolking die over de wolkenhoogtemeter is getrokken. Er zijn diverse studies uitgevoerd om vast te stellen in hoeverre beide waarnemingen met elkaar overeenkomen (zie bijvoorbeeld Wauben, 2002). De verschillen die daarbij worden gevonden vallen in dezelfde orde van grootte als de onzekerheid die verwacht mag worden van de waarnemer. Over het jaar 2000 gemiddeld gaf de automaat voor waarneemstation De Bilt een 0,2 okta lagere bedekkingsgraad met gemiddelde absolute afwijking van 1,2 okta. De frequentieverdeling van de uurlijks gerapporteerde bedekkingsgraad door de waarnemer en de automaat voor De Bilt over dit jaar zijn uitgezet in figuur 3. De mindere ruimtelijke representativiteit van de wolkenhoogtemeter komt vooral tot uiting in het grotere aantal geheel onbewolkte en geheel bewolkte situaties. Een waarnemer ziet vaker dan de automaat een geïsoleerde wolk of een gat in een vrijwel gesloten wolkendek.
Hoewel de eigenschappen van menselijk waargenomen en automatisch bepaalde bewolking verschillen, heeft de praktijk aangetoond dat een meteoroloog goed kan omgaan met de nieuwe informatie. Wolkenhoogtemeters hebben behalve economische voordelen ook het voordeel dat objectieve metingen op een uniforme wijze worden verricht. Daarnaast meet de sensor continu en wordt elke 10 minuten de bewolking gerapporteerd voor een dertigtal locaties in het KNMI-meetnet.
Een nieuwe toepassing in het atmosferisch onderzoek is mogelijk geworden met het zogenoemde backscatterprofiel van moderne wolkenhoogtemeters. Dit is het uit de atmosfeer gereflecteerde LIDAR-signaal als functie van de hoogte. De uitgezonden lichtpulsen worden behalve door bewolking ook, zij het in minder sterke mate, gereflecteerd door aërosolen, kleine, in de lucht zwevende roet- en stofdeeltjes. Moleculaire backscatter speelt bij de golflengte waarbij de wolkenhoogtemeter werkt geen rol (zie de paragraaf LIDAR aan het einde van dit artikel). Met behulp van de gemeten reflectie kan de verticale gelaagdheid van aërosolen in de atmosfeer gevolgd worden. De meeste aërosolen bevinden zich doorgaans in de zogeheten atmosferische grenslaag dicht bij het aardoppervlak omdat daar de uitstoot plaatsvindt. De hoogte van deze laag varieert sterk en is afhankelijk van de stabiliteit van de atmosfeer. Op mooie zonnige dagen kan deze laag overdag meer dan 2 kilometer dik worden, terwijl deze ’s nachts meestal slechts enkele tientallen tot honderden meters dik is. De grenslaaghoogte is een belangrijke variabele bij de verspreiding van luchtverontreiniging of voor het berekenen van het transport van broeikasgassen in de atmosfeer. Bij de overgang van deze grenslaag naar de vrije troposfeer die hier direct boven ligt, neemt de concentratie aan aërosolen in het algemeen sterk af en zal dus ook het gemeten reflectiesignaal een grote afname vertonen.

Een mooi voorbeeld van de backscatter gemeten door een wolkenhoogtemeter in het nationale observatorium voor atmosfeeronderzoek in Cabauw is te zien in figuur 4. De profielen zijn over 10 minuten gemiddeld om de ruis te onderdrukken. Het algoritme voor de grenslaaghoogte, ontwikkeld bij het KNMI, bepaalt per profiel de top van maximaal twee significante aërosollagen (De Haij et al. 2007). Deze toppen zijn in figuur 4 aangegeven met respectievelijk zwarte en witte stippen. De rode lijn beschrijft de hoogte waarop de signaal-ruisverhouding van het backscatterprofiel te laag is geworden om nog een betrouwbare grenslaaghoogte te kunnen afleiden. De significante afname in reflectie aan de top van de grenslaag is goed te zien in de verkleuring naar donkerblauw ter hoogte van de zwarte stippen. Deze mooie zomerdag kent een sterke opbouw van de grenslaag als gevolg van de instraling door de zon. Rond 14 uur wordt de grenslaagdetectie onderbroken door het ontstaan van cumulusbewolking met een wolkenbasis op ongeveer 1100 meter hoogte (de roodgekleurde gebieden in figuur 4, de kruisjes geven de onderkant van de wolken aan). ’s Avonds wordt de top van een nieuwe aërosollaag gedetecteerd nadat door een geringe draaiing van de wind een luchtsoort met een andere hoeveelheid aërosolen is aangevoerd. De witte stippen rond 1200 m zijn het restant van de grenslaag van de afgelopen dag (de zogenoemde residulaag). De consistentie van de stippen met de tijd geven een indicatie van de kwaliteit van de grenslaagbepaling.
In lang niet alle situaties is het mogelijk om de grenslaaghoogte betrouwbaar af te leiden. Bij mist, lage bewolking of neerslag wordt het backscatterprofiel teveel verstoord. Ook bevat het backscatterprofiel aan de top van de grenslaag soms teveel ruis waardoor detectie onmogelijk is. Uit een haalbaarheidsstudie bleek dat de grenslaaghoogtedetectie in 40 tot 60% van de tijd slaagt en in 20-30% met een goede kwaliteit. Er bestaan LIDAR-systemen met een groter power-aperture product (laser vermogen maal grootte van telescoop) die beter geschikt zijn voor het nauwkeurig meten van aërosolprofielen in de atmosfeer, maar de wolkenhoogtemeter is een continu, automatisch, veilig en relatief goedkoop meetinstrument.
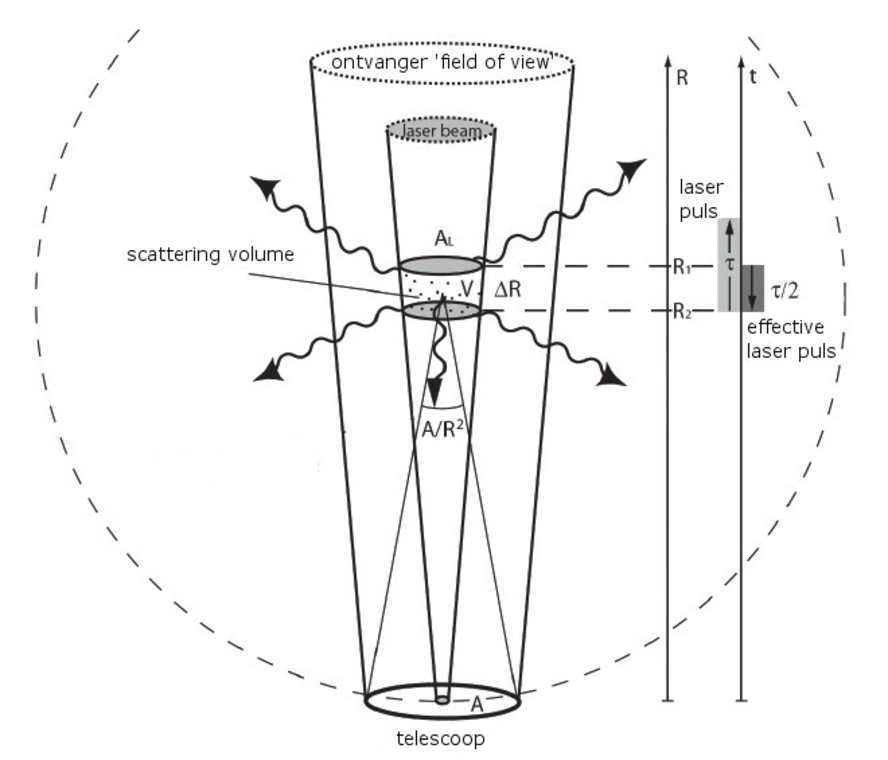
De wolkenhoogtemeter is gebaseerd op het LIDAR principe (Light Detection And Ranging). Hierbij bepaalt de tijd tussen het zenden en het terugontvangen van een laserpuls de hoogte van het verstrooiende medium (figuur 5). De zender van de wolkenhoogtemeter is een InGaAs diode laser met een golflengte van 855 nm en een piekvermogen van 20 W. De pulslengte is 50 ns en de pulsherhalingsfrequentie is ongeveer 6,5 kHz. De ontvanger is een Si-avalanche fotodiode. De bundeldivergentie van zender en ontvanger is 1 mrad en beide hebben een lensdiameter van 140 mm. Dit maakt de wolkenhoogtemeter een oogveilig LIDAR instrument dat continu metingen verricht in alle weersomstandigheden met een minimum aan onderhoud. De verticale resolutie van de wolkenhoogtemeter is 7 m en het meetbereik is 13 km.
Het terugontvangen signaal geeft informatie over de lichtverstrooiingseigenschappen van deeltjes in de atmosfeer als functie van de hoogte. Uit het signaal is informatie over mist, neerslag, aërosolen en wolken af te leiden; moleculaire backscatter speelt bij deze golflengte geen rol. Wolkendruppels in waterwolken hebben typisch een doorsnede van enkele micrometers. In deze wolken is het signaal binnen honderd tot tweehonderd meter vrijwel geheel uitgedoofd en komt er geen signaal meer terug. Meerdere wolkenlagen kunnen daarom alleen worden gedetecteerd bij gebroken bewolking en/of optisch dunne wolken. Voor detectie van lage bewolking is een integratietijd van 15 sec voldoende, voor hoge bewolking loopt dit op tot 10 minuten.

Bij kortere golflengtes gaat ook de moleculaire backscatter een rol spelen. Naast de elastische backscatter maakt bijvoorbeeld een Raman LIDAR ook gebruik van de golflengteverschuiving door Raman verstrooiing aan gasmoleculen. Hiermee is het o.a. mogelijk om waterdampconcentratie en temperatuur te bepalen. Het RIVM heeft een krachtige Raman LIDAR, genaamd CAELI, ontwikkeld voor het continu en gelijktijdig meten van waterdamp, wolken en optische- en deeltjeseigenschappen van aërosolen (figuur 6). Deze LIDAR, gebaseerd op een Nd:YAG laser, zendt licht uit bij drie verschillende golflengtes (1064, 532 en 355 nm). Het systeem heeft verschillende ontvangers die zowel analoge als photon counting technieken gebruiken om een groot dynamisch bereik te krijgen van de LIDAR echo’s. Verticaal heeft deze lidar een resolutie van 7.5 m. De atmosferische condities bepalen mede het verticale bereik. Voor waterdamp kan in de nacht een hoogte van 12 km gehaald worden. De eigenschappen van wolken en stofdeeltjes kan CAELI meten tot in de lage stratosfeer (20 km).