Meteorological measurements are essential in meteorology and climatology and are core task of KNMI. The R&D Information and Observation Technology Division (I-RD) works continually on improvements of KNMI’s observation infrastructure.
Concerning surface observations ongoing activities are related to: (i) selecting, introducing and accepting sensor replacements for sensors that are at the end of their life cycle; (ii) selection and evaluation of sensors that use measurement techniques with economical or quality advantages; (iii) investigate sensor behaviour and data processing in order to solve known shortcomings; (iv) exploration and evaluation of new sensors that are a potential source of additional information. Below three highlights of ongoing activities are given that illustrate the introduction of a new measurement technique (sonic wind sensor), the investigation for improvement of precipitation detection and discrimination of precipitation type (TeNSor), and the evaluation of a new sensor system (NubiScope) for cloud measurements.
Introduction of a new measurement technique: sonic wind sensors
Introduction
Sonic wind sensors measure the time a sound pulse takes to travel between two transducers. When the travel times forward and back over a known distance are known, the wind speed component along that path can be derived together with the speed of sound in air. The latter is dependent on ambient temperature and to lesser degree also on relative humidity. A two dimensional (2D) sonic wind sensor with two transducer pairs gives the horizontal wind speed and direction as well as the so-called virtual temperature.
In 2002-2003 three commercial 2D sonic wind sensors have been evaluated by KNMI(1). The results were promising although the sensors did not meet all the requirements of KNMI. Newer versions of the 2D sonics, that meet the criteria, have recently come on the market. Hence KNMI selected a 2D sonic and started a project to introduce the sonics in the measurement network and get operational experience under various conditions. Although the reason for the replacement of conventional cup anemometers and wind vanes by sonic wind sensors is economical - sonics have no moving parts and require much less maintenance - the project is not only an INFRA Department affair. Users of the Climate and Weather Departments are involved in order to evaluate the results and to study the small differences with conventional cup anemometers and wind vanes that can be expected due to the different dynamical properties of the wind sensors.
Wind tunnel tests
Wind tunnel tests have been performed in the Low Speed Tunnel (LST) of the Dutch National Aerospace Laboratory (NLR) and in the TNO (Netherlands Organisation for Applied Scientific Research) wind tunnel. The LST wind tunnel tests are used for the verification of the absolute calibration of the horizontal wind whereas the TNO wind tunnel has been used for performing tests with inclined sonic wind sensors. All sensors have also been tested in the KNMI wind tunnel. Since the measurement volume of the KNMI tunnel is too small it cannot be used for the absolute calibration. However, it proved to be useful for testing the reproducibility of the sonic wind measurements.
Figure 2 (lower panel) shows the deviations of the azimuth averaged wind speed of two 2D sonics and three cup anemometers versus the LST wind tunnel reference up to 75 m/s. The results of the KNMI cup anemometers show an underestimation of the wind speed at low values (due to friction) and at high values (due to turbulence), but the results are well within the WMO accuracy limit of ±10%. The sonic wind sensors are close (<1%) to the reference wind speed over the full wind speed range. Note that the deviations in sonic wind speed and direction depend on the wind direction (upper panel). These errors are largest (3%) when the wind is parallel to a transducer pair because then the wind field along the measurement path is disturbed.
Field test
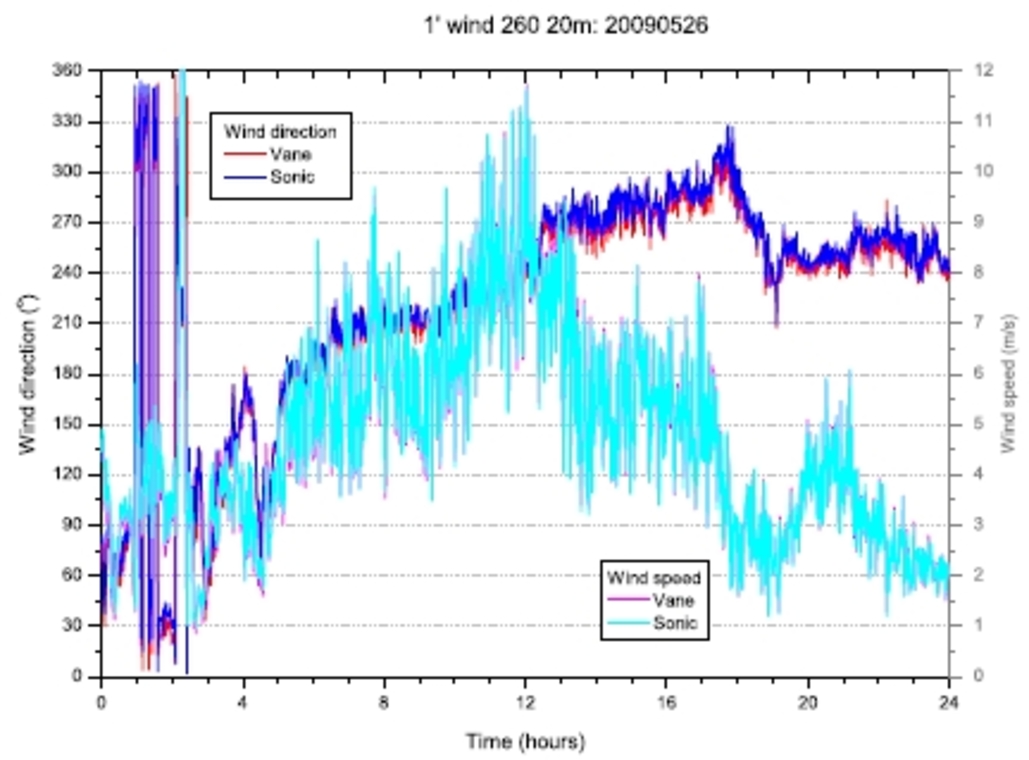
The sonics have been installed at 10 locations throughout the Netherlands which have been selected to give a wide variety of conditions. The location include e.g.: climatological stations Vlissingen and De Bilt with long historical records and high spatial variations in surface roughness around the locations; North Sea platform Lichteiland Goeree and the pier of IJmuiden where high wind speeds are observed in a saline environment; airports Schiphol (runway 18R) and Volkel where noise and vortices by aviation can be expected; the Cabauw research site of KNMI with optimal measurement conditions; Vlieland with the wind sensor on a sandy plain. At all locations the sonic wind sensor is installed in parallel to the existing cup anemometer wind vane combination (see Figure 1). The distance between the sonic and cup anemometer is 1 m and the sensors are aligned perpendicular to the prevailing South West wind direction. Figure 3 shows an example of the measurements obtained at 20 m altitude in De Bilt.


Conclusion
The wind tunnel tests showed that the 2D sonic wind sensors and cup anemometers meet the accuracy requirements for wind speed and direction over the full wind speed range, the results of the sonics generally being better. The field test shows that the wind speed and
The 1-minute averaged wind direction and wind speed at De Bilt on May 26th, 2009 reported by cup/vane and sonic. The differences in wind direction show an alignment error of 4° and have a standard error of 3°. The daily averaged difference in wind speed is 0.03m/s with a standard error of 0.11m/s. direction reported by the sonic are generally in very good agreement with those reported by the KNMI cup anemometer and wind vane, respectively. Some larger deviations and even data outages have been observed at De Bilt that are related to solid precipitation events and birds disturbing or even blocking the measurement path. The manufacturer provided a sensor with an improved heating and equipped with bird refuses, which is currently installed at De Bilt. The sonics have been made available in the measurement network in order to facilitate the user evaluation.
Exploration of new sensors for the observation of precipitation type
Introduction
KNMI operates the Vaisala FD12P present weather sensor for observations of visibility, precipitation type and duration in the national meteorological observation network. The sensor uses the principle of forward scattering of infrared light in a small volume of air. Precipitation type is derived internally by analysing the signals from the optical receiver and a capacitive rain detector, together with temperature. However, some shortcomings of this observation have been recognized since its introduction(2,3,4), particularly with precipitation type discrimination around zero degree Celsius, hail detection and the detection of very light precipitation events. Correction algorithms for the precipitation type did not give sufficient improvement. Therefore, it was decided to investigate the performance of new sensors for the observation of precipitation type in the TeNSor project, and investigate their added value over the FD12P.
Four sensors were selected and purchased for this test in the beginning of 2008. The optical disdrometers Thies Laser Precipitation Monitor (LPM) and Ott Parsivel measure the extinction in a horizontal sheet of light to estimate the diameter and fall velocity of each individual particle. The precipitation type is determined from the particle property statistics compared to empirical relationships. The Lufft R2S sensor, a small 24 GHz Doppler radar system, is also included, as well as the Vaisala WXT520 weather transmitter. The latter sensor is an all-in-one compact weather station with a piezoelectric precipitation sensor on top that is able to distinguish between rain and hail particles.
Field test and evaluation
The sensors are installed on the test field in De Bilt since September 12th, 2008 (see Figure 4). Data messages are acquired every minute and averaged to 10-minute and hourly weather codes, which are evaluated on a routine basis by data validation specialists and meteorologists. They can enter their level of agreement with the sensors in a web-based form. The sensors on the test field are colocated within 30 m of the FD12P and the other meteorological sensors, which offers the opportunity to analyse the relation with other parameters (e.g. precipitation amount, wind) as well.
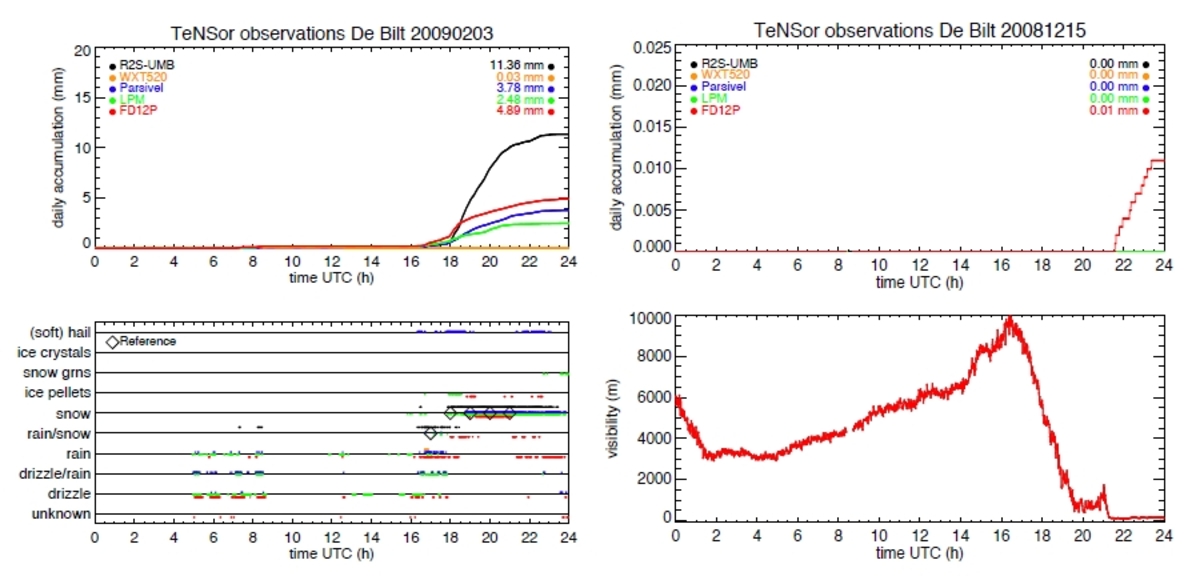
A winter situation where the Thies LPM and Ott Parsivel significantly deviate from the FD12P is presented in Figure 5 (left panels). Both optical disdrometers start to report mixed and solid precipitation from 16UT, which is in better agreement with the evaluation of the meteorologist than the rain reported by the FD12P. The reported large amount of hail reports by the Parsivel, which is a common feature for this sensor, has however not been confirmed. Note furthermore that the LPM seems more sensitive for very light precipitation, reporting a significant number of drizzle events between 13 and 14 UT. The detection and precipitation type capabilities of the Lufft R2S and Vaisala WXT520 seem inadequate.

Another case, where the FD12P falsely detects precipitation during dense fog, is illustrated in Figure 5 (right panels). Visibility values drop below 200 m shortly after 21 UT, leading to successive reports of snow and snow grains with intensities up to 0.03 mm/h. Improvement can be achieved on this point as well, as the other sensors in the test clearly suffer less from this problem.
Conclusion
Based on the evaluation in the first winter of the test, the Thies disdrometer is the most promising sensor for improving the observation of the precipitation type in the maerurement network of KNMI. More specifically, it seems to give added value on hail discrimination and demonstrates good results during transitions between liquid and solid precipitation and the detection of very light precipitation. It should however be mentioned that the Thies disdrometer also has its shortcomings, i.e. it suffers from false detections due to insects and spider webs and shows a significant wind direction dependency of the measured precipitation amount. The latter was confirmed in an analysis of DWD data from three LPM sensors with different orientations.

Wintry precipitation events in one season are sparse and the evaluation by meteorologists has its limitations because they scarcely have the opportunity to perform a detailed evaluation during solid precipitation events. Therefore the test was extended to the end of the winter season 2009-2010. Furthermore a second field test with the Thies LPM at the airports Schiphol and Rotterdam airport is being prepared since the human observer can play an important role in the evaluation. In addition, the combination of the results of the rain gauge, the FD12P and the disdrometer in order to obtain an optimal precipitation detection and type discrimination needs to be investigated in more detail.
Evaluation of a new sensor system for cloud observations: NubiScope
Introduction
Since November 2002 all synoptic cloud observations at KNMI are performed automatically and more recently the aeronautical cloud observations in the aviation routine weather reports (METAR) are automated for some regional and military airports. For that purpose the cloud base detections of a ceilometer (Vaisala LD40) of the previous half hour (10 minutes for AUTOMETAR) are processed with an algorithm that combines the individual cloud hits into up to 3 cloud layers each with base and cloud amount. Experience indicated that although the results of manual and automated cloud observations show good overall agreement, large differences do occur in certain situations when the measurements of the ceilometer are not representative for the full hemispheric cloud cover as reported by an observer. In 2006 KNMI evaluated a scanning Infrared (IR) sensor, the so-called NubiScope (Figure 6), which can determine the cloudiness over the full hemisphere during day- and night-time(50). In 2008 such a sensor was purchased by the Regional Climate Division in order to improve the cloud observation at Cabauw and also to provide temperature information of the cloud base and the ground surface. An evaluation of the NubiScope is performed jointly by the Regional Climate, Infra R&D and Weather Production Divisions.
NubiScope measurements
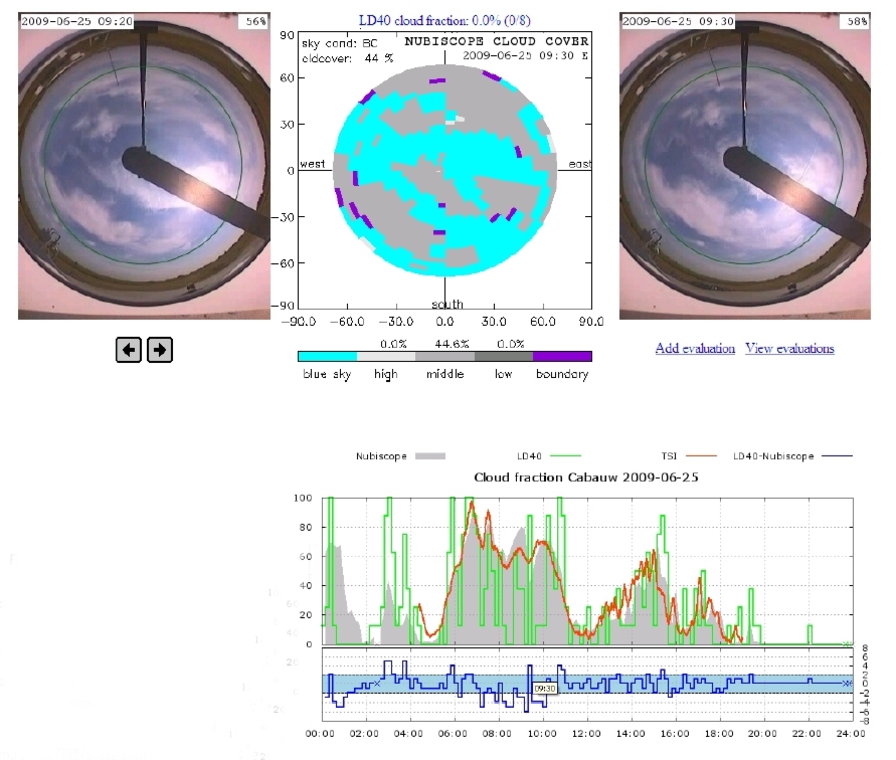
Since April 2008 the NubiScope is installed at the Baseline Surface Radiation Network (BSRN) site of Cabauw. The NubiScope consists of a pyrometer which is sensitive in the thermal infrared (10-14 µm) with a field of view of 3° mounted on a pan-and-tilt unit. The NubiScope works fully automatic and performs a scan of the overhead hemisphere (36 azimuth and 30 zenith angles) and two surface temperature measurements every 10 minutes. The observed temperatures are processed in order to derive the obscuration type (fog, precipitation, clouds) and cloud characteristics (cloud cover, layering and altitude). The NubiScope determines the presence of clouds from the deviation of the measured sky temperature from a clear sky value. The cloud height follows from the temperature by assuming a standard temperature profile. A product of the NubiScope is a cloud mask that shows the spatial distribution of low, middle and high cloud (see Figure 7).
NubiScope evaluation
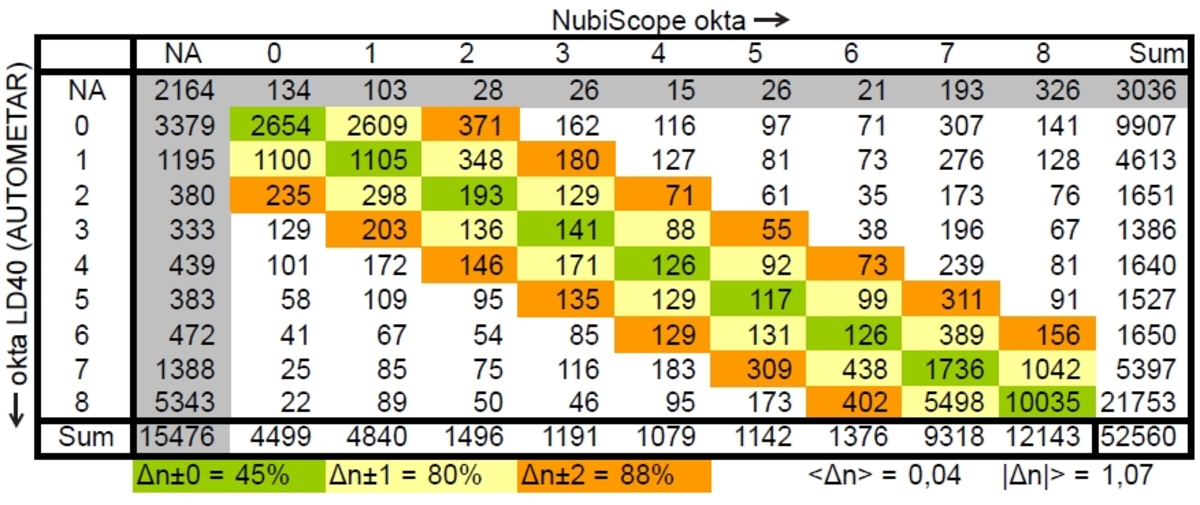
The total cloud results of the NubiScope are being evaluated by comparing the results with those obtained by the LD40 ceilometer and other sensors available at Cabauw, such as the cloud radar and Total Sky Imager. The differences between the NubiScope and the LD40 are similar to the differences observed between the manual observer and the LD40. The differences in total cloud cover are in 88% of the cases ±2 okta or less (see Table 1). As a result of scanning the NubiScope is able to detect clouds in almost clear sky situations or gaps in overcast situations. This is illustrated by the reduced number of occurrences of 0 and 8 okta and increased occurrences of 1 and 7 okta of the NubiScope compared to the LD40. The evaluation by the Weather Department is performed by the observers at Rotterdam airport by analysing the 10-minute NubiScope, LD40 and TSI results. Their findings are entered in a web tool.
Conclusion
The evaluation showed that the total cloud cover reported by the NubiScope has a better spatial representativeness than the LD40 and its frequency distribution shows better agreement with reports by human observers. The sensitivity of the NubiScope for high clouds is still a bit unclear. Often it seems to be better than that of the LD40, but certainly not as good as that of the cloud radar. The results of the NubiScope might be affected by contamination of the lens and atmospheric moisture. This needs to be investigated in more detail. The Climate Division decided to keep the NubiScope as a permanent instrument at the Cabauw research site.
References
Wauben, W. M. F., 2007. Wind Tunnel and Field Test of Three 2-D Sonic Anemometers. KNMI Technical Report TR 296, KNMI, De Bilt, the Netherlands.
Wauben, W.M.F., 2002. Automation of visual observations at KNMI; (I) Comparison of present weather. Symposium on Observations, Data Assimilation and Probabilistic Prediction, Orlando, Florida, 13-17 January 2002, American Meteorological Society.
Meulen, J.P. van der, 2003. Exploratory actions on automatic present weather observations. Final report. EUMETNET PWS-SCI report, De Bilt, the Netherlands.
Haij, M.J. de, 2007. Automated discrimination of precipitation type using the FD12P present weather sensor: evaluation and opportunities. KNMI Technical Report TR 297, KNMI, De Bilt, the Netherlands.
Wauben, W.M.F., 2006. Evaluation of the NubiScope. KNMI Technical Report TR 291. De Bilt, the Netherlands.